

คุณกำลังติดตาม
มีข้อผิดพลาดติดตามผู้ใช้
ผู้ใช้รายนี้ไม่อนุญาตให้ติดตามได้
คุณได้ติดตามผู้ใช้รายนี้อยู่ก่อนแล้ว
แพ็กเกจสมาชิกของคุณให้สิทธิคุณติดตามได้ไม่เกิน0 คน เท่านั้น อัปเกรดแพ็กเกจสมาชิกได้ที่นี่
เลิกติดตาม สำเร็จแล้ว
มีข้อผิดพลาดในการเลิกติดตามผู้ใช้
คุณได้แนะนำ
มีข้อผิดพลาดในการแนะนำผู้ใช้
มีบางอย่างผิดพลาด โปรดรีเฟรชหน้าแล้วลองอีกครั้ง
ยืนยันอีเมลเรียบร้อยแล้ว

layyah,
pakistan
ตอนนี้เป็นเวลา 5:50 หลังเที่ยง ที่นี่
เข้าร่วม เมษายน 21, 2015
4
การแนะนำ
Naveed M.
@naveedmazhardz
5.9
5.9
91%
91%
layyah,
pakistan
98%
ทำงานสำเร็จ
85%
อยู่ในงบประมาณ
86%
เสร็จตามกำหนด
20%
อัตราการจ้างซ้ำ
PhD Electrical Engineering (Control Systems)
ติดต่อ Naveed M. เกี่ยวกับงานของคุณ
เข้าสู่ระบบเพื่อหารือเกี่ยวกับรายละเอียดผ่านการแชท
ผลงาน
ผลงาน

Control of Mobile Robots

Local GRE (GAT General)

Mathematical Drawings In Microsoft Visio

MS Electrical Engineering (Degree)


Siemens PLC Interface with HMI
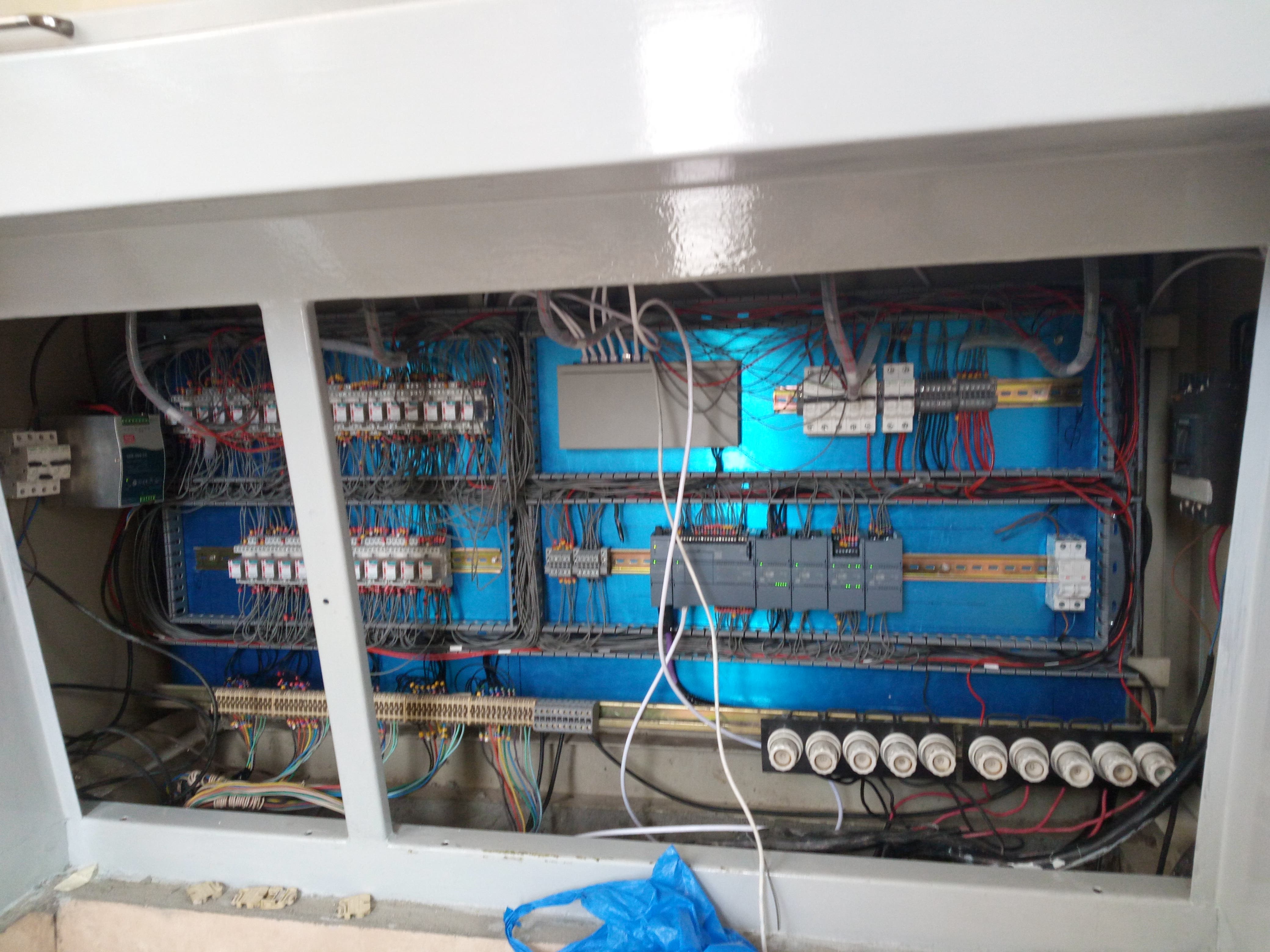

Control System Development using Siemens S7-1200

Control System Development using Siemens S7-1200
Control of Mobile Robots
Local GRE (GAT General)
Mathematical Drawings In Microsoft Visio
MS Electrical Engineering (Degree)
Siemens PLC Interface with HMI
Control System Development using Siemens S7-1200
Control System Development using Siemens S7-1200
รีวิว
บันทึกการเปลี่ยนแปลงแล้ว
กำลังแสดง 1 - 5 / 49 รีวิว
$250.00 USD
Electronics
Matlab and Mathematica
Electrical Engineering
Mathematics
+ อีก 1 ทักษะ
K
•
$250.00 USD
Electronics
Matlab and Mathematica
Electrical Engineering
Mathematics
+ อีก 1 ทักษะ
K
•
$420.00 USD
Electronics
Matlab and Mathematica
Electrical Engineering
Mathematics
+ อีก 1 ทักษะ
A

•
$135.00 USD
Electronics
Matlab and Mathematica
Electrical Engineering
Mathematics
+ อีก 1 ทักษะ
A
•
$135.00 USD
Digital Design
Circuit Design
Calculus
Control Engineering
+ อีก 1 ทักษะ
A
•
ประสบการณ์
Research Assistant
ส.ค. 2016 - ปัจจุบัน
I am working as Control design Engineer in UAV Research Lab.
Lab Engineer
ม.ค. 2015 - ก.ค. 2015 (6 เดือน, 1 วัน)
I instructed VLSI Design Lab using Microwind and DSCH tools for one semester. Besides that, I assisted in microprocessor and system interfacing lab. Additionally, I offered my services for one month special tutorial as MATLAB instructor for Biomedical Engineers.
การศึกษา
PhD Electrical Engineering (Control Systems)
(4 ปี)
MS Electrical Engineering (Control Systems)
(3 ปี)
BSc Electrical (Electronics) Engineering
(4 ปี)
คุณสมบัติ
Nonlinear Control Systems
NUST SEECS
2017
3 days Workshop on Nonlinear Control Systems from Professor Dr. Hassan Khalil
ผลงานตีพิมพ์
Predefined-time control of nonlinear systems
Elsevier
[https://doi.org/10.1016/j.aej.2021.12.030]
This work addresses the predefined-time convergence problem for a class of second order nonlinear systems subjected to matched disturbances. A novel family of sigmoid function based terminal sliding surfaces is proposed for which robust fixed time convergence is guaranteed. The stability properties are established through the Lyapunov framework. In the proposed technique, bound on the settling time is user-defined for arbitrary initial conditions.
Full-state modeling and nonlinear control of balloon supported unmanned aerial vehicle
Emerald
Multi-rotor unmanned aerial vehicles (MUAVs) are equipped with controllers but are constrained by smaller flight endurance and payload carrying capability. On the contrary, lighter than air (LTA) aerial vehicles have longer flight times but have poor control performance for outdoor operations. One of the solutions to achieve better flight endurance and payload carrying capability is to augment the LTA balloon to MUAV.
Robust Decentralized Nonlinear Formation Control of Multiagent Quadrotor
IEEE
In this article the leaderless formation protocol is proposed for a class of square multi-input multi-output nonlinear multiagent systems with an undirected communication graph. The six degree of freedom underactuated nonlinear model of multiagent quadrotor is considered.The sliding mode-based finite-time position, altitude and heading formation is established based on Lyapunov stability theory.
(DOI: 10.1109/ICEEE49618.2020.9102501)
Comprehensive study of skid-steer wheeled mobile robots development and challenges
Emerald
This article provides a comprehensive and unified presentation of recent developments in skid-steer wheeled mobile robots (SSWMR) with regard to its control, guidance and navigation for the researchers who wish to study in this field. Different prospects of SSWMR have been discussed including its design, application, locomotion, control, navigation and guidance.
Robust output feedback control of fixed-wing aircraft
Emerald
Feedback linearization-based state feedback (SFB) controller is considered along with a robust outer loop control which is designed using Lyapunov’s second method. A high-gain observer (HGO) in accordance with the separation principle is used to implement the output feedback (OFB) control scheme. The robustness of the controller and observer is assessed by introducing uncertain aerodynamics coefficients in the dynamic model. The proposed scheme is validated using MATLAB/SIMULINK.
Design and Analysis of a High-Gain and Robust Multi-DOF Electro-thermally Actuated MEMS Gyroscope
MDPI.
Open Access Article. Please follow the link.
https://www.mdpi.com/2072-666X/9/11/577
Design and Modeling of Robust Multi Degree of Freedom Micro Gyroscope with Wide Bandwidth
IEEE.
Micro gyroscopes are among the rapidly aggrandizing field of the micro electro mechanical systems (MEMS), which is procured with its extensive range of applications around the globe. This paper depicts an innovated approach of designing and modeling of a novel brawny multi-mass gyroscope to acquire dynamic motion amplification and spacious bandwidth.
Modelling Inspiration and Expiration Mechanism of Lungs using Bond Graph
IEEE.
In proposed work, inspiration and expiration mechanism of lungs has been modelled using Bond Graphs. Lung segments are assigned Hydraulic analogies using cylinders and accumulators. Upper airway from nostrils to trachea is modelled as single cylinder having resistance and associated compliance effect. Trachea to lower lung segment consists of 23 generations of airways.Model is capable of predicting the true PV curves and thus leading to screening of lungs diseases.
Bond Graph Modeling of Lungs
IEEE.
Mathematical model of lungs is used to distinguish the pulmonary diseases. In this work bond graph model of breathing mechanism . Hydraulic analogies are allocated to lungs using cylinders and accumulators. In this study, 2 generations are considered with resistance, compliance and inertial effect. These generations are modeled with cylinders with decreasing sizes. Model can be used for clinical trials with any existing mechanical ventilator.
ติดต่อ Naveed M. เกี่ยวกับงานของคุณ
เข้าสู่ระบบเพื่อหารือเกี่ยวกับรายละเอียดผ่านการแชท
การยืนยันตัวตน
ใบรับรอง
ทักษะเด่น
ค้นหา freelancer ที่คล้ายกัน:
ค้นหาผลงานที่คล้ายกัน
ส่งคำเชิญเรียบร้อยแล้ว
ขอบคุณ! เราได้ส่งลิงก์สำหรับเครดิตฟรีให้คุณทางอีเมลแล้ว
เกิดข้อผิดพลาดขณะส่งอีเมลของคุณ กรุณาลองอีกครั้ง
ไม่สามารถคัดลอกไปยังคลิปบอร์ดได้ โปรดลองอีกครั้งหลังปรับเปลี่ยนการอนุญาต
คัดลอกไปยังคลิปบอร์ดแล้ว
กำลังโหลดตัวอย่าง
ได้รับอนุญาตสำหรับตำแหน่งทางภูมิศาสตร์
เซสชั่นการเข้าสู่ระบบของคุณหมดอายุและคุณได้ออกจากระบบแล้ว กรุณาเข้าสู่ระบบอีกครั้ง